"Sketch"-based motion planning
|
This work aimed to create a path planner for car-like nonholonomic vehicles. The planner "constructs" a solution by stringing together a sequence of known "motion sketches", or parts thereof, into a trajectory that satisfies all global constraints. Sketches are rough motion outlines, possibly parametrized, and have a corresponding controller capable of then executing that particular motion. This is meant to be a local planner, hence one of its inputs is a rough, kinematic path plan, which it will then attempt to roughly follow, system dynamics permitting. Algorithm operation can be summarized as:
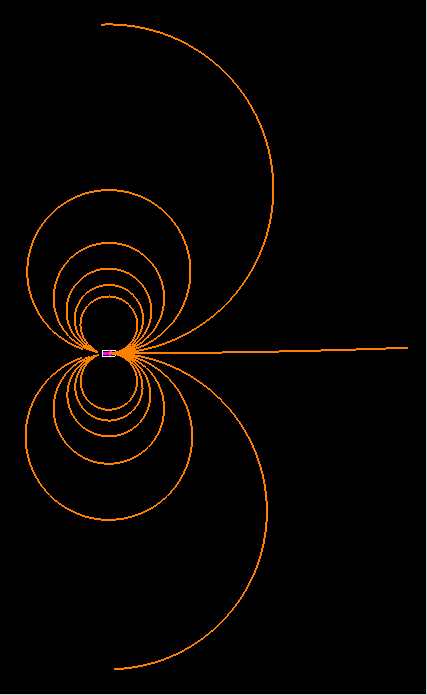
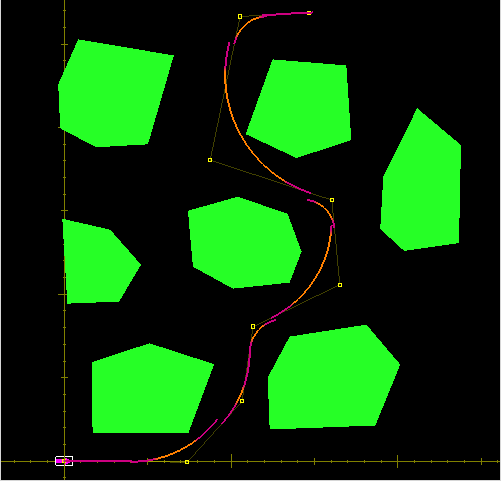
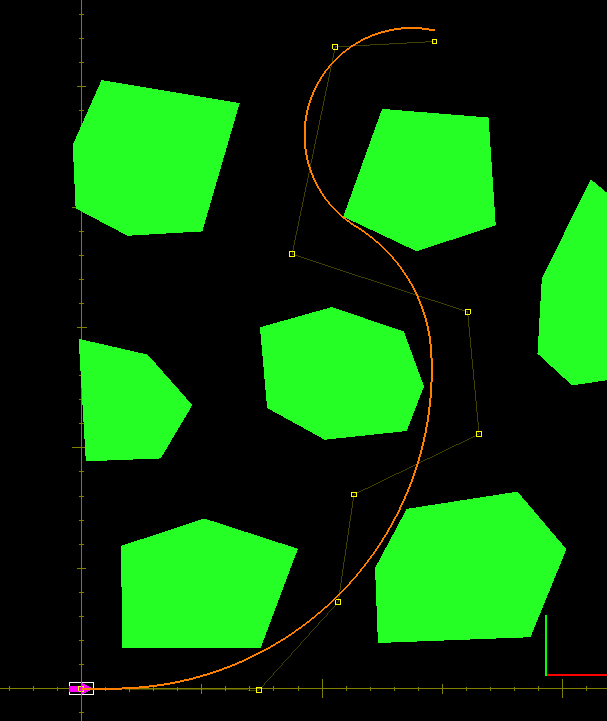
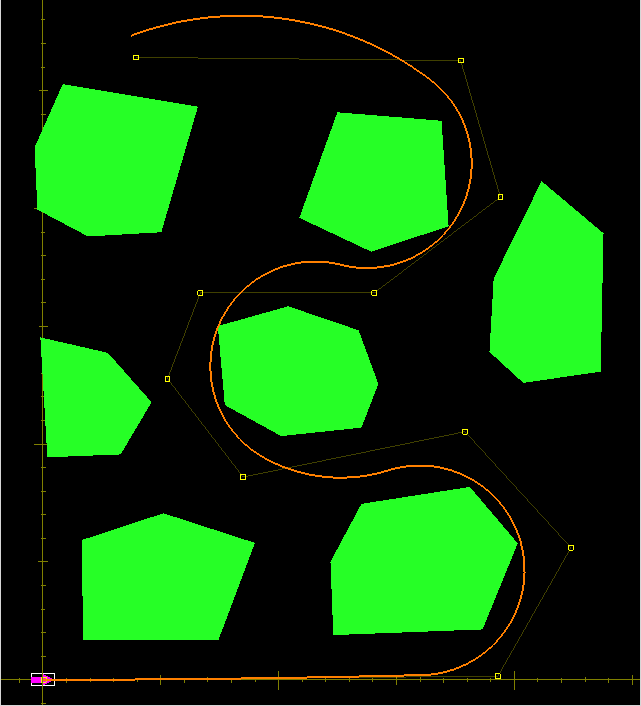
Images: upper-left shows a sample "motion sketch repertoire" for a car, while at bottom we see a sample intermediate (i.e., unsmoothed) solution; right hand side shows different solutions. |
|