A Grasp-based Motion Planning Algorithm for Character Animation
Abstract
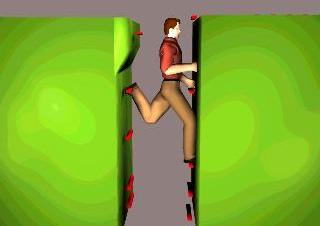
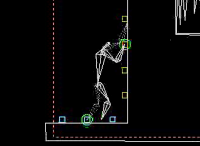
The automated animation of human characters continues to be a challenge in computer graphics. We present a novel kinematic motion planning algorithm for character animation which addresses some of the outstanding problems. The problem domain for our algorithm is as follows: given an environment with designated handholds and footholds, determine the motion as an optimization problem. The algorithm exploits a combination of geometric constraints, posture heuristics, and gradient descent optimization in order to arrive at an appropriate motion sequence. The method provides a single framework for animated characters capable of animating the model using an assortment of modes of locomotion and capable of solving complex constrained locomotion tasks. We illustrate our results with demonstrations of a human character using walking, swinging, climbing, and crawling in order to navigate in a variety of environments.Publications
The EuroGraphics paper, subsequent journal paper (JVCA), final Master's thesis, and related slides are all available on the publications page.Simple results
Here we present simple results, solutions to "building-block" subproblems.A more involved problem
 |
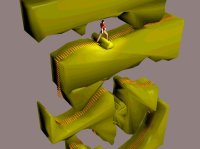
Below we present an example of an environment that we would like
the planner to be able to solve for, and one solution worked out
by our planner. This is the "complex" problem discussed in the
thesis. The problem was specified by providing only the starting
and final configurations of the character, as well as the
pregenerated/canned sequence of the character sliding down the
ramp.
|
  |
{kind=link}
Additional results
These movies were made by exporting the motion generated by our planner into Poser 4, a rendering package by MetaCreations.
- flat.mpg
- abyss.mpg
- easy-hatch.mpg
- hard-hatch.mpg
- hill.mpg
- hill-bar.mpg
- stairs.mpg
- tunnel-walk.mpg
- tunnel-limbo.mpg
- tunnel-crawl.mpg
- there-n-back.mpg
- crevice1.mpg
- crevice2.mpg
- fire-escape-bar.mpg