Landmark-based bike motion planning
|
In this work a very robust path-following bike controller was developed, as well as a number of strategies for laying down "realistic" guide paths (i.e., obstacle-hugging, similar to how a human would ride). Again, this planner is intended for local motion planning, with the global path strategy being provided by an external source (e.g., user, kinematic RRT or PRM, etc.) The heart of the path-following controller lies in the following observations:
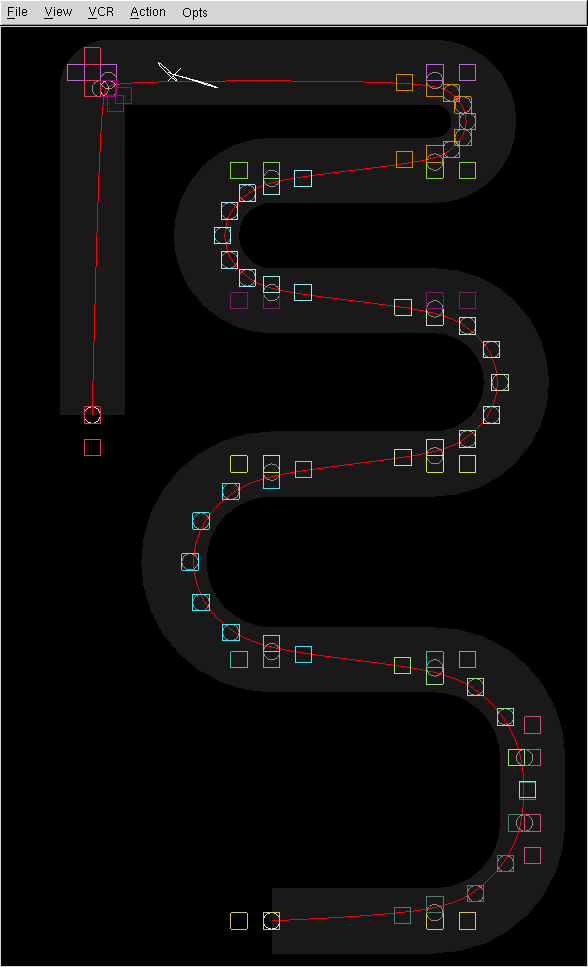
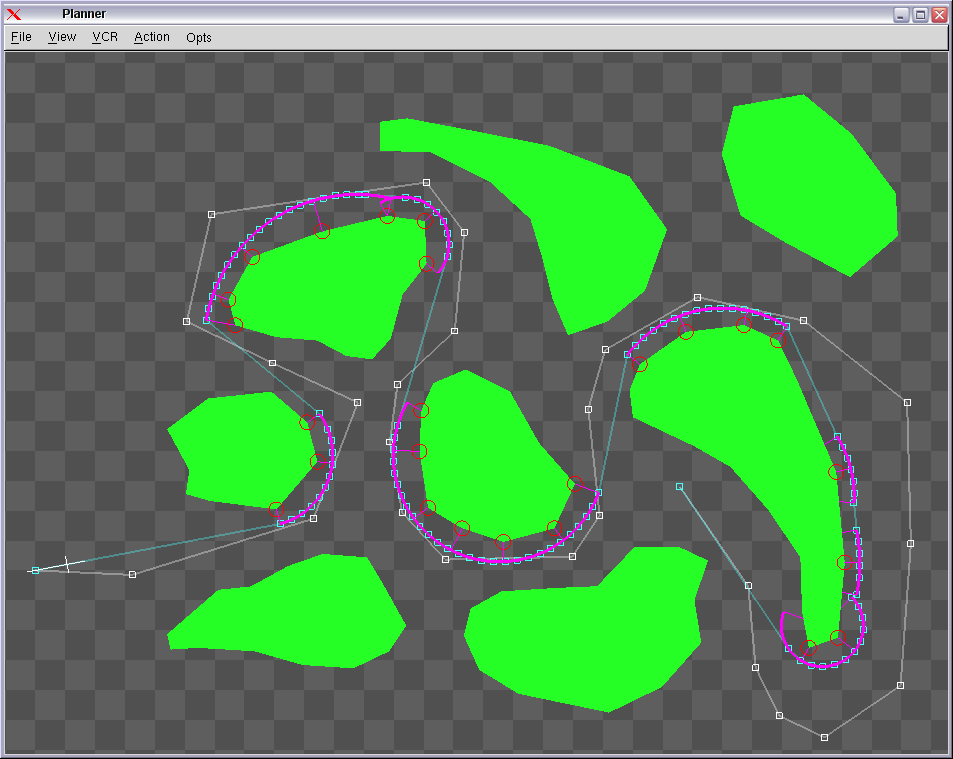
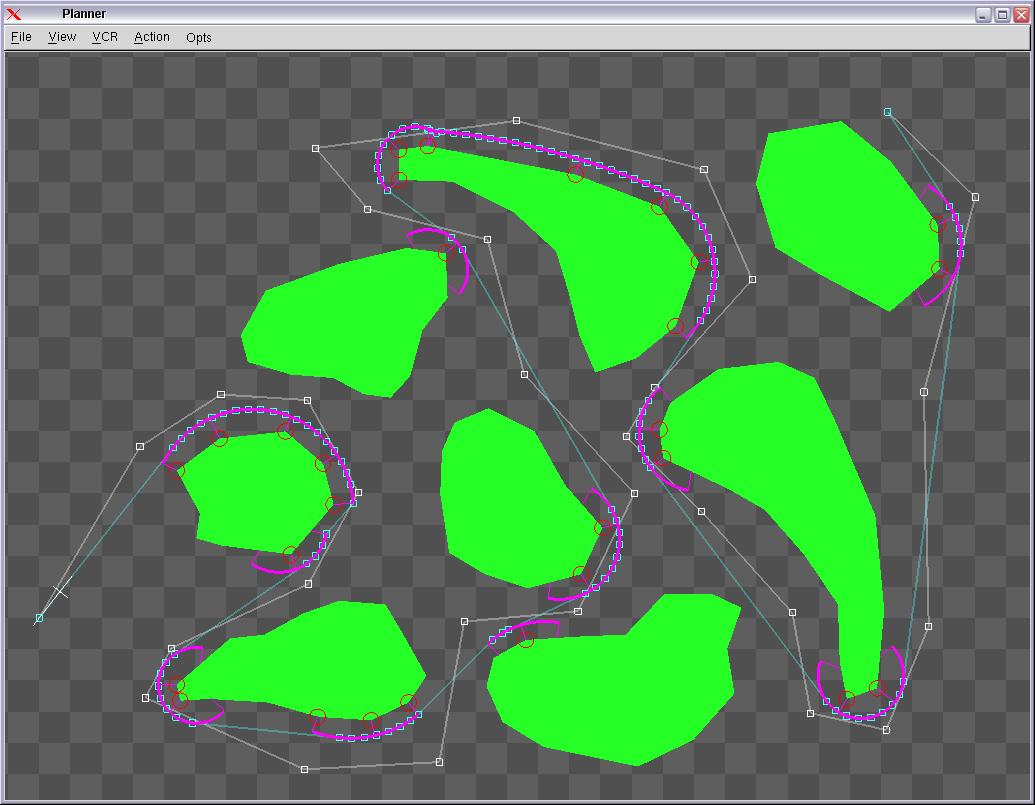
The bottom left image shows a spline-based guide-path for road navigation, while on the right we show various solutions for less structured environment. In these the coarse line is the global strategy (input), while the closer hugging line (cyan) is the computed guide-path. |
|