We propose and explore a new method for the implicit time integration of elastica. Key to our approach is the use of a mixed variational principle. In turn, its finite element discretization leads to an efficient and accurate sequential quadratic programming solver with a superset of the desirable properties of many previous integration strategies. This framework fits a range of elastic constitutive models and remains stable across a wide span of time step sizes and material parameters (including problems that are approximately rigid). Our method exhibits convergence on par with full Newton type solvers and also generates visually plausible results in just a few iterations comparable to recent fast simulation methods that do not converge. These properties make it suitable for both offline accurate simulation and performant applications with expressive physics. We demonstrate the efficacy of our approach on a number of simulated examples.
@inproceedings{10.1145/3550469.3555418,
author = {Trusty, Ty and Kaufman, Danny and Levin, David I.W.},
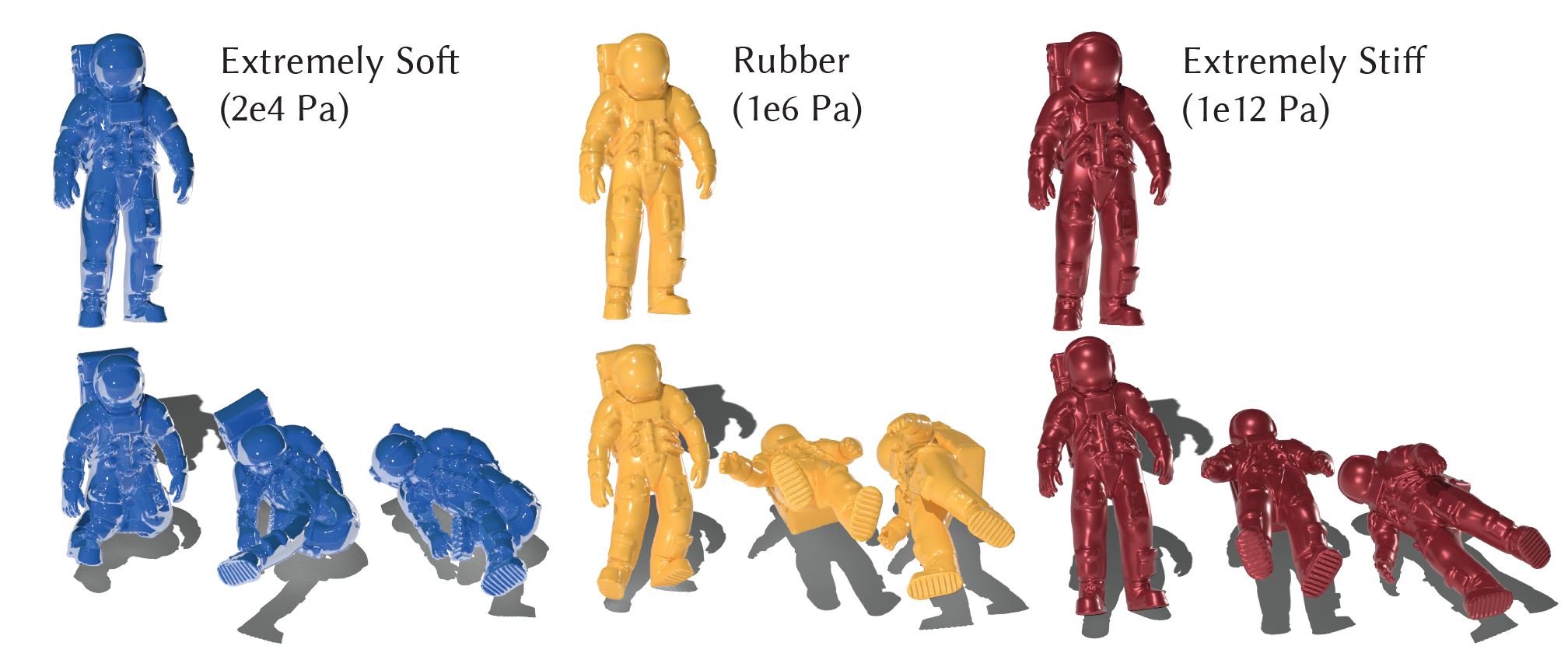
title = {Mixed Variational Finite Elements for Implicit Simulation of Deformables},
year = {2022},
isbn = {9781450394703},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
url = {https://doi.org/10.1145/3550469.3555418},
doi = {10.1145/3550469.3555418},
booktitle = {SIGGRAPH Asia 2022 Conference Papers},
articleno = {40},
numpages = {8},
keywords = {physics simulation, physics-based animation},
location = {Daegu, Republic of Korea},
series = {SA '22}
}
This work is funded in part by NSERC Discovery (RGPIN-2017-05524), Connaught Fund (503114), CFI-JELF Fund, Accelerator (RGPAS-2017-507909), the Canada Research Chairs Program, and the Ontario Early Researchers Award.