Gaussian Process Dynamical Models for Human Motion
Abstract
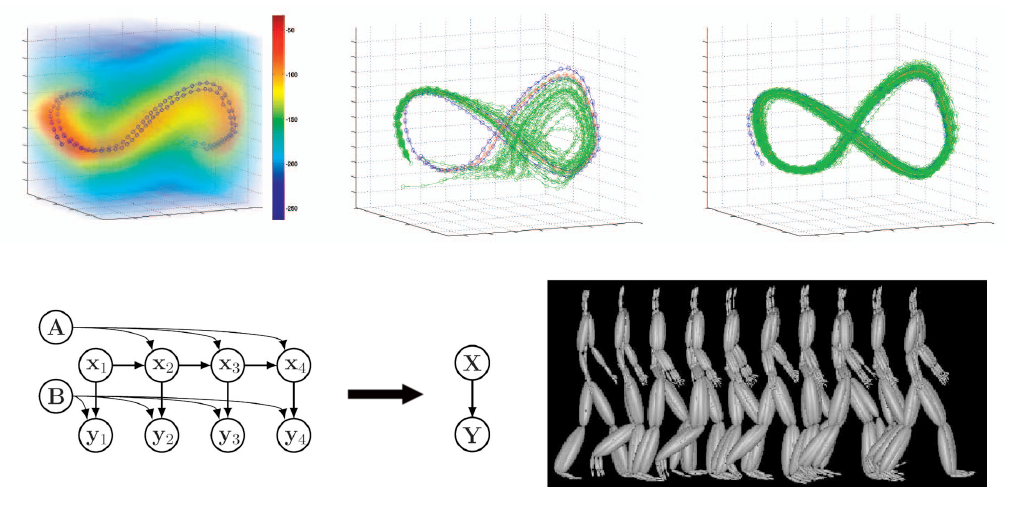
We introduce Gaussian process dynamical models (GPDMs)
for nonlinear time series analysis, with applications to learning
models of human pose and motion from high-dimensional motion capture
data. A GPDM is a latent variable model. It comprises a low dimensional
latent space with associated dynamics, as well as a map from the latent
space to an observation space. We marginalize out the model parameters
in closed form by using Gaussian process priors for both the dynamical
and the observation mappings. This results in a nonparametric model for
dynamical systems that accounts for uncertainty in the model. We
demonstrate the approach and compare four learning algorithms on human
motion capture data, in which each pose is 50-dimensional. Despite the
use of small data sets, the GPDM learns an effective representation of
the nonlinear dynamics in these spaces.
People
Jack M. Wang
David J. Fleet
Aaron Hertzmann
Papers
Wang, J. M., Fleet, D. J., Hertzmann, A. Gaussian Process Dynamical Models for Human Motion. In IEEE Transactions on Pattern Recognition and Machine Intelligence. February, 2008. pp. 283-298.
Errata: Figures 7 and 8 on page 292 are incorrectly printed, please find the corrected figures appended to the end of the pdf.
Note: Over the years, a few people have asked me about how Equation (10) is derived.
Wang, J. M., Fleet, D. J., Hertzmann, A. Gaussian Process Dynamical Models. In Proc. NIPS 2005. December, 2005. Vancouver, Canada. pp. 1441-1448.
Software
A version of this work has been implemented by Neil Lawrence as an extension to his GP-LVM software packages. Visit his Gaussian process software page for downloading information.
The current version of our GPDM code, which includes code that generate HMC samples and other mocap utils, but are not nearly as organized as Neil's code.
Videos
Supplemental Video for PAMI
Pages below contain animated gifs that link to corresponding
QuickTime movies (some over 10 MB); jpegs link to higher-resolution jpeg
images.
3D GPDM
2D GPDM
Missing Data Demo Golf Demo
Acknowledgements
The authors would like to thank Neil Lawrence and Raquel Urtsasun for their comments on the manuscript, and Ryan Schmidt for assisting in producing the supplemental video. The volume rendering figures were generated using Joe Conti’s code on www.mathworks.com.
This project is funded in part by the Alfred P. Sloan Foundation,
Canadian Institute for Advanced Research, Canada Foundation for
Innovation, Microsoft Research, Natural Sciences and Engineering
Research Council (NSERC) Canada, and Ontario Ministry of Research and
Innovation. The data used in this project was obtained from mocap.cs.cmu.edu. The database was created with funding from the US National Science Foundation Grant EIA-0196217.