2D GPDM
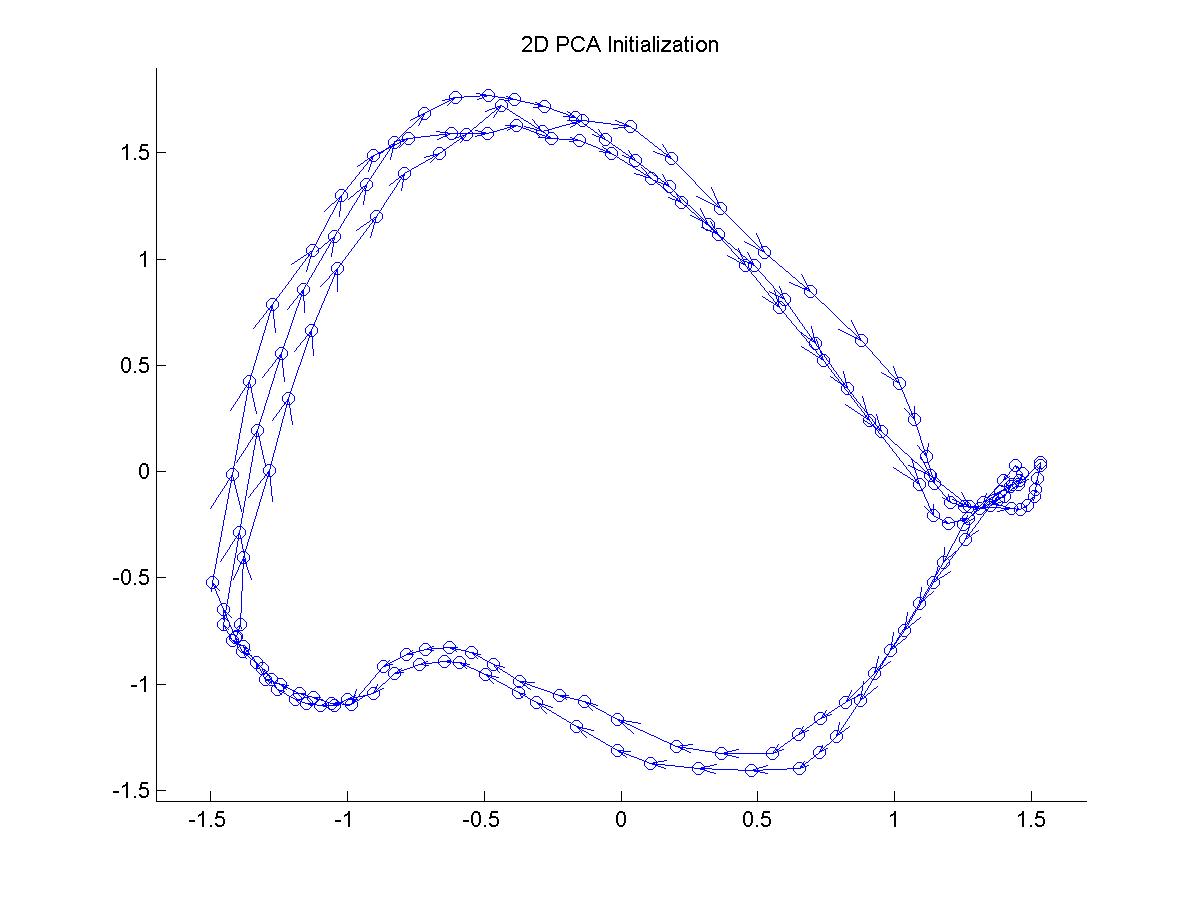
The 2D PCA initialization results in a significant self-intersection on the
right, which corresponds to identical (or very close by) input values mapping to
different output values in the dynamics function. This is treated as noise
in a first order dynamical model.
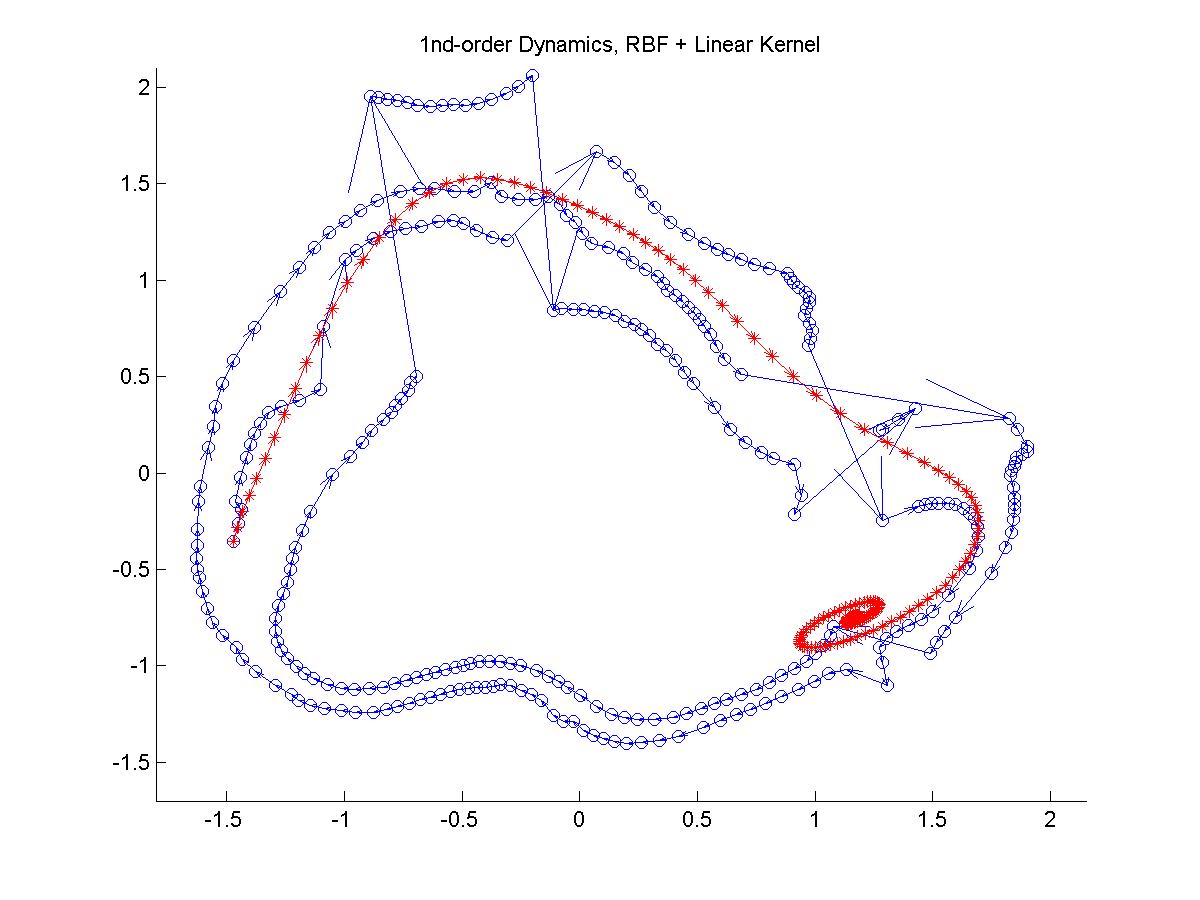
GPDM with a linear+RBF kernel. The nonlinear kernel produces a limit
cycle despite large jumps in the 2D latent trajectories (Fig 3a). The blue data
points are moved by the optimization to reduce reconstruction error at the cost
of a few large jumps in the latent space dynamics. The GPDM does a
reasonable job at reconstructing the walk cycle, but notice the jerkiness in the
right foot of the character at ground contact.


A GPDM based on the same data, but sampled at 120 frames per gait cycle. Discontinuities in the latent curves cause the simulation to get stuck at a local attractor (Fig 3c).