1University of Toronto , 2Stanford University, 3Adobe Research
SIGGRAPH North America 2023
Abstract
We propose a reduced-space elasto-dynamic solver that
is well suited for augmenting rigged character
animations with secondary motion. At the core
of our method is a novel deformation subspace based on
Linear Blend Skinning that overcomes many of the shortcomings
prior subspace methods face. Our skinning subspace is parameterized
entirely by a set of scalar weights, which we can obtain through
a small, material-aware and rig-sensitive generalized eigenvalue problem.
The resulting subspace can easily capture rotational motion and
guarantees that the resulting simulation is rotation equivariant.
We further propose a simple local-global solver for linear co-rotational
elasticity and propose a clustering method to aggregate per-tetrahedra
non-linear energetic quantities. The result is a compact simulation
that is fully decoupled from the complexity of the mesh.
@article{benchekroun2023FastComplemDynamics,
title = {Fast Complementary Dynamics via Skinning Eigenmodes},
author = {Otman Benchekroun, Jiayi Eris Zhang, Siddhartha Chaudhuri, Eitan Grinspun, Yi Zhou, Alec Jacobson},
year = {2023},
journal = {ACM Transactions on Graphics},
}
Summary
We add secondary motion to rig animations in real-time by using a subspace for the physics simulation.
We propose a linear blend skinning-like subspace for secondary motion.
Our subspace is fully parameterized by a set of skinning weights, which are found
via an eigen-decomposition of the elastic energy Laplacian
With a simple modification to the elastic energy Laplacian,
our skinning eigenmodes can be made rig-aware, and satisfy the rig-orthogonality constraint inherently
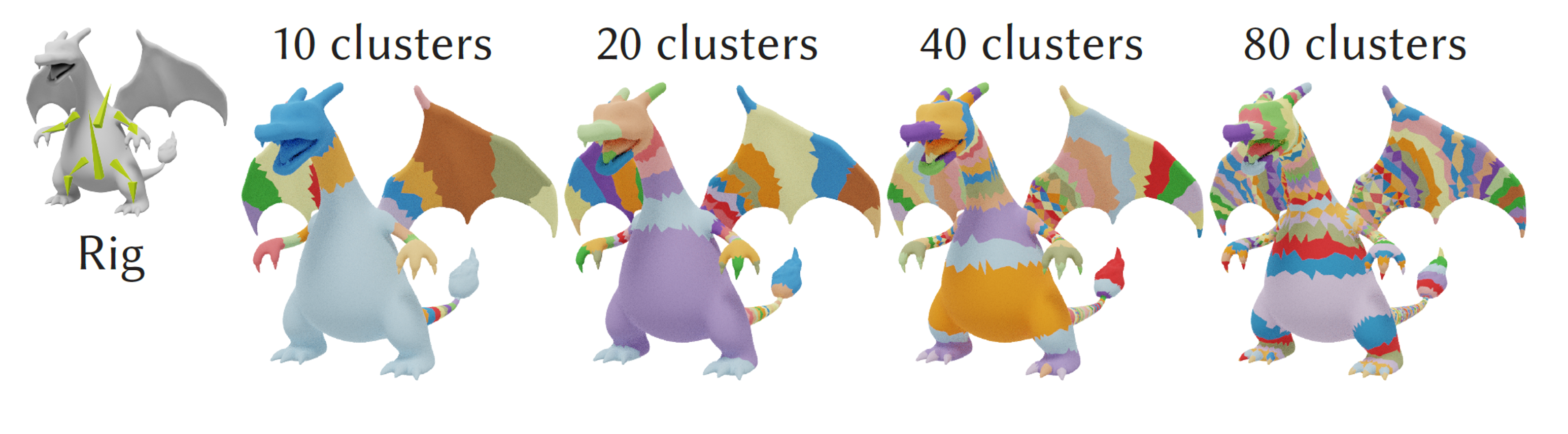
To accelerate computation of energetic non-linearities in our simulation, we extend our skinning modes with
skinning clusters. Our clusters reflect the rig-awareness of our skinning weights
IK Chicken
Pose Tracking
Face Tracking
Interactive Aquarium
Acknowledgements
This project is funded in part by NSERC Discovery (RGPIN2017–05235,
RGPIN-2021-03733,
RGPAS–2017–507938) New Frontiers of Research Fund (NFRFE–201),
the Ontario Early Research Award program, the Canada Research
Chairs Program, a Sloan Research Fellowship, the DSI Catalyst Grant program and gifts by Adobe Inc. Otman Benchekroun was funded by an NSERC CGS-M scholarship, while Jiayi Eris Zhang is funded by a Stanford Graduate Fellowship.
We thank David I.W. Levin, Danny M. Kaufman, Doug L. James, Ty Trusty, Sarah Kushner and Silvia Sellán for insightful conversations. We thank Alejandra Baptista Aguilar for early discussion and adoption in 3D environments, and for providing some of the models in the paper. We thank Silvia Sellán, Selena Ling, Shukui Chen, Aravind Ramakrishnan and Kinjal Parikh for proofreading. We thank Xuan Dam and John Hancock for technical and administrative assistance throughout the course of this project.