Optimizing Walking Controllers
Abstract
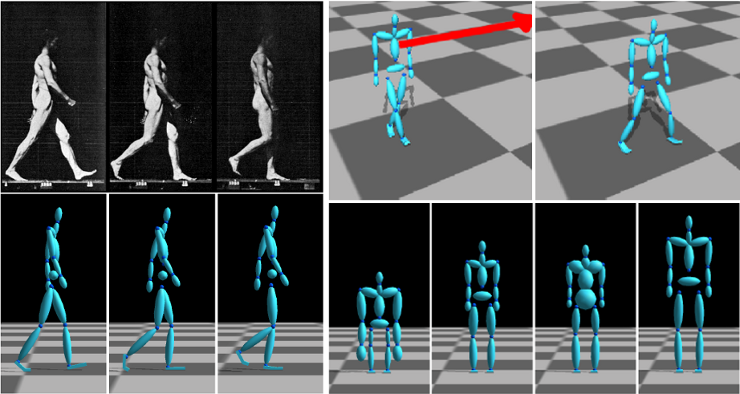
This paper describes a method for optimizing the parameters of a physics-based controller for full-body, 3D walking. A modified version of the SIMBICON controller [Yin et al. 2007] is optimized for characters of varying body shape, walking speed and step length. The objective function includes terms for power minimization, angular momentum minimization, and minimal head motion, among others. Together these terms produce a number of important features of natural walking, including active toe-off, near-passive knee swing, and leg extension during swing. We explain the specific form of our objective criteria, and show the importance of each term to walking style. We demonstrate optimized controllers for walking with different speeds, variation in body shape, and in ground slope.People
Jack M. WangDavid J. Fleet
Aaron Hertzmann
Paper
Wang, J. M., Fleet, D. J., Hertzmann, A. Optimizing Walking Controllers. ACM Transactions on Graphics 28, 5 (Proceedings of SIGGRAPH Asia 2009), Article 168, December 2009, 8 pages.Slides
SIGGRAPH Asia talk slides.Video
High resolution (640x480)
Low resolution (320x240)