Optimizing Walking Controllers for Uncertain Inputs and Environments
Abstract
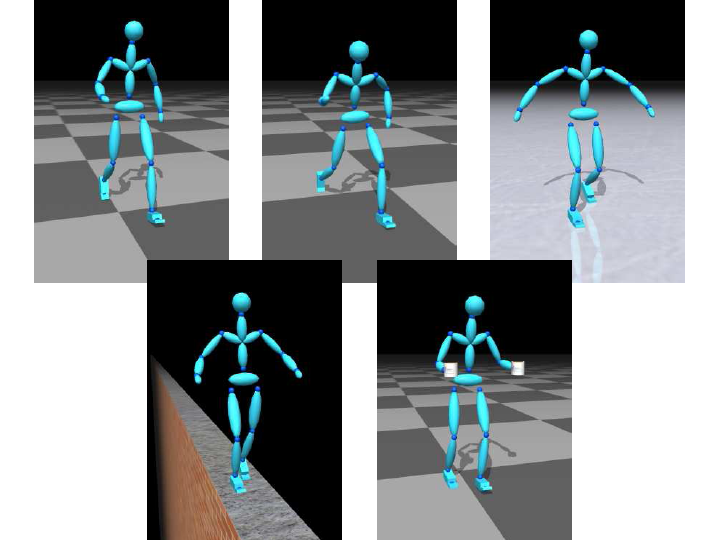
We introduce methods for optimizing physics-based walking controllers for robustness to uncertainty. Many unknown factors, such as external forces, control torques, and user control inputs, cannot be known in advance and must be treated as uncertain. These variables are represented with probability distributions, and a return function scores the desirability of a single motion. Controller optimization entails maximizing the expected value of the return, which is computed by Monte Carlo methods. We demonstrate examples with different sources of uncertainty and task constraints. Optimizing control strategies under uncertainty increases robustness and produces natural variations in style.People
Jack M. WangDavid J. Fleet
Aaron Hertzmann
Paper
Wang, J. M., Fleet, D. J., Hertzmann, A. Optimizing Walking Controllers for Uncertain Inputs and Environments. ACM Transactions on Graphics 29, 4 (Proceedings of SIGGRAPH 2010), Article 73, 8 pages.Slides
To come...Supplemental Video
Download (720x480)
Additional Supplemental Video
Download (720x480)